Há muito tempo os engenheiros tentam construir um robô que imite a capacidade das lagartixas para escalar paredes e tetos.
Jeff Krahn e sua equipe da Universidade Simon Fraser, no Canadá, estão quase lá.
Este é o primeiro robô que consegue rodar naturalmente ao subir e descer por superfícies homogêneas, sejam metálicas, de plástico ou de vidro - ou mesmo paredes bem lisas.
Outras tentativas já usaram ímãs, ventosas, espinhas dorsais robóticas e até garras, mas nenhuma até agora teve sucesso em superfícies variadas.
Krahn e sua equipe se voltaram então para os materiais bioinspirados, que tentam imitar a adesão em escala microscópica usada pelas lagartixas, cujos pés possuem pequenas saliências que aderem à superfície pela força de Van der Waals.
Superando obstáculos
O Stickybot lembra muito mais uma lagartixa, mas o agora apresentado TBCP-II (Timeless Belt Climbing Platform) é mais rápido.
Com as microssaliências autoadesivas espalhadas por suas quatro esteiras (ou lagartas), o robô de 240 gramas move-se a uma velocidade de 3,4 centímetros por segundo.
Outra vantagem é que a sustentação gerada pelos dois conjuntos de esteiras é suficiente para permitir que o robô supere os cantos, passando de uma superfície horizontal para uma superfície vertical.
Ele ainda não consegue andar de cabeça para baixo, mas pode superar caixas ou outros obstáculos que encontrar pelo caminho, desde que sempre haja uma superfície com área suficiente para apoiar pelo menos um dos seus conjuntos de suas esteiras.
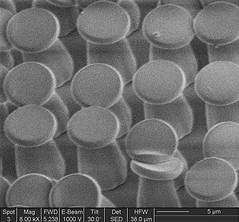
As minúsculas almofadas que recobrem as lagartas do robô - também conhecidas como adesivos fibrilares secos - têm o formato de pequenos cogumelos. [Imagem: MENRVA Research Group]
As minúsculas almofadas que recobrem as lagartas do robô - também conhecidas como adesivos fibrilares secos - têm o formato de pequenos cogumelos, medindo 17 micrômetros de diâmetro por 10 micrômetros de altura.
Elas foram fabricadas com um polímero chamado PDMS (polidimetilsiloxano).
"Embora as forças de van der Waals sejam consideradas relativamente fracas, as saliências superficiais em formato de cogumelo garantem que a área de contato entre o robô e a superfície seja maximizada," disse Krahn.
O próximo passo da pesquisa é desenvolver uma estratégia para que robô consiga carregar sua própria fonte de energia e um "cérebro" capaz de permitir que ele navegue autonomamente.
Nenhum comentário:
Postar um comentário